UVOD
Kdo smo? Skupina sestoji iz treh članov: Julijan Peric, Tadej Tomanič in Aljaž Vaupotič. Vsak član skupine je s svojim prizadevnim delom pripomogel k uspešni izvedbi projekta. Velike zasluge gredo tudi našim asistentom Klemnu Kelihu, Mateju Gabrijelčiču ter Sergeju Faletiču, ki so nas spodbujali ter usmerjali naše ideje.
Kakšna je bila naša naloga? Zasnovati ter preizkusiti smo morali dve neodvisni metodi oz. dva eksperimenta za določanje prožnostnega koeficienta gume in primerjati dobljene rezultate.
Prvi utrinki, ideje. Krepko označene so tiste, ki smo jih naposled tudi izvedli.
- Preprost poskus aplikacije linearnega Hookovega zakona
- Vrtljiv elektromotor
- Frača
- Vzmetno nihalo
- Energijski zakon
TEORIJA
Deformacije
Vsako telo je v enem od treh agregatnih stanj:
- v trdnem
- v tekočem
- v plinastem
Trdna telesa smemo velikokrat obravnavati kot toga, če je njihova deformacija zanemarljiva, a v tem primeru nas zanimajo ravno njihove deformacije. Za toga telesa, ki jih opišemo kot sistem točkastih teles, velja, da je razdalja med posameznimi točkami konstantna. V primeru deformacij pa to ne velja, saj razdalja med poljubnima točkama ni konstantna in je potrebno posebej upoštevati premik vsake izmed točk.[1]
Telo se deformira zaradi vpliva zunanjih sil. Zaradi tega delujejo na del telesa v okolici izbrane točke sile okoliških delov. Če vzamemo za naš sistem celo telo, so te sile notranje. Zamislimo si poljubno majhen kvader, ki ga izrežemo iz telesa. Na ta kvader delujejo na vse ploskve sile, in ker je telo mirujoče, je vsota vseh zunanjih sil ter navorov nanj enaka nič.[1][2][3]

Sedaj telo obremenimo in opazujemo deformacijo v ravnovesju. V kolikor imamo opravka z dovolj majhnim kvadrom, je velikost sil sorazmerna s površino ploskev, na katerih prijemljejo. Pri deljenju sile F s površino ustrezne ploskve S dobimo količino, ki se imenuje napetost:[1]

V splošnem so lahko napetosti in deformacije povezane na zelo zapleten način, zato se omejimo na izotropna trdna telesa, to so tista telesa, ki imajo v vseh smereh enake lastnosti.[1]
Poznamo več različnih oblik deformacij, vendar bomo omenili le nateg ali stisk v eni smeri , saj smo ga uporabili pri eksperimentalnem delu in je za nas edini ključnega pomena. Zamislimo si stebriček trdne snovi s presekom S in dolžino l, ki ga obremenimo s silo F na nateg ali na stisk, da se raztegne ali skrči.[1][2]
Pri dovolj majhni sili je raztezek s sorazmeren s silo.

Ta zakon se po angleškem fiziku Robertu Hooku imenuje Hookov zakon, pri čemer k pomeni koeficient trdnega telesa (npr. vzmeti ali, v našem primeru, gume). Sedaj drugega ob drugem sestavimo dva enaka in enako obremenjena stebrička. Tako dobimo stebriček z dvojnim presekom, ki je obremenjen z dvojno silo. Ugotovimo, da je pri nespremenjeni dolžini in istem raztezku sila sorazmerna s presekom. Nato dva enaka in enako obremenjena stebrička sestavimo drugega za drugim. Tako dobimo dvakrat daljši stebriček, ki pa ima tudi raztezek dvakrat daljši. Tako lahko ugotovimo, da je pri nespremenjenem preseku in isti sili raztezek sorazmeren z začetno dolžino stebrička.[1] Hookov zakon lahko torej zapišemo v drugačni obliki

F/S je natezna napetost,Δl/l relativni raztezek, E pa koeficient, ki ga imenujemo prožnostni modul in je lastnost vsakega telesa ter ima enoto N/m [2].
Hookov zakon pa je le linearni približek in velja le na dovolj ozkem intervalu, kjer je sila še dovolj majhna, da je raztezek sorazmeren s pripadajočo silo

Izraz, ki smo ga uporabili pri izračunu koeficienta iz znane mase m in natezne sile F , je bil torej:

Nihanje
Nihanje v širšem pomenu je vsako periodično gibanje, običajno pa s tem izrazom mislimo na sinusno nihanje. V našem primeru se bomo osredotočili na premo sinusno nihanje, saj se tako giblje majhna utež, ki je obešena na zelo lahko vijačno vzmet (v našem primeru smo jo nadomestili z gumijastim trakom), če jo v navpični smeri premaknemo iz ravnovesne lege in spustimo.[1]
Časovni potek premega sinusnega gibanja dobimo s projiciranjem točkastega telesa, ki enakomerno kroži v ravnini xy, na os x ali os y. Če je r radij kroga, φ zasuk točke in ω kotna hitrost, je x=r∙cosφ.[1] Za premo sinusno nihanje lahko zapišemo:[2]

Da dobimo hitrost, odvajamo lego po času:

Z drugim odvodom lege po času pa dobimo pospešek:

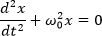
Vsako nedušeno nihanje[2][3], tj. nihanje, kjer ni disipativnih sil, lahko torej opišemo z enačbo:
Kot zgled [3] si poglejmo naš primer, torej vzmetno nihalo, za katero veljata tako Hookov kot II. Newtonov zakon

Vemo tudi, da je pospešek drugi odvod lege po času, zato enačbo prepišemo v drugačno obliko:

Če damo oba člena na isto stran, dobimo enačbo nedušenega nihanja. Z uporabo nastavka za reševanje take enačbe:

kjer je δ fazni premik, dobimo enačbo za lastno krožno frekvenco takega nihala:

Nihanje našega nihala je bilo v resnici dušeno, saj se je energija nihanja zaradi trenja in upora s časom zmanjšala. Tudi takšno nihanje lahko opišemo z enačbo, če je izguba energije premo sorazmerna energiji nihanja. A v našem primeru, kjer smo merili le nihajni čas, to je čas enega nihaja, je dovolj dober približek že, če kot matematični model za opis gibanja uporabimo enačbo nedušenega nihanja, saj se pri dušenem nihanju zmanjšuje le amplituda nihanja (odmik od ravnovesne lege), in sicer eksponentno pojema, nihajni čas pa se pri tem ne spremeni.
Izraz, ki smo ga uporabili pri izračunu koeficienta k pri znanem nihajnem času t0 in masi m, je tak:

VIRI
- [1] Strnad, Fizika 1.del: Mehanika in toplota, DMFA založništvo,Ljubljana, 2010
- [2] Halliday, Resnick, Walker, Principles of Physics, Wiley & Sons, 2011
- [3]Wikipedija, prosta enciklopedija: http://sl.wikipedia.org/wiki/Nihanje. Pridobljeno dne 29.4.2015 Vrsta licence: Dovoljenje GNU za rabo proste dokumentacije.
- [4] Wikipedija, prosta enciklopedija:http://sl.wikipedia.org/wiki/Nihanje#/media/File:Simple_harmonic_oscillator.gif Vrsta licence: Avtor Oleg Alexandrov dovoli javno uporabo animacije v vse namene.
{kind=link}
EKSPERIMENT
Merjenje raztezka ob obremenitvi gume
Potrebščine: Guma (pravokotna trakova 4 cm x 31 cm ter 2 cm x 31 cm), les (za vpetje gume), žica, 4 vijaki, 2 kovinska stabilizatorja, olfa nož, meter, merilo, akumulatorska vrtilka, uteži, pisalo, primež, brusilni papir, prenosni silomer Vernier, računalnik.
Kontrolne spremenljivke: m – masa uteži, x – raztezek gume, l – dolžina gume, k – koeficient gume
Poskus je potekal pri sobnih pogojih.
Ideja: Pri obremenjevanju gume z utežmi smo merili njen raztezek ter preverili, ali gre za linearni Hookov zakon.
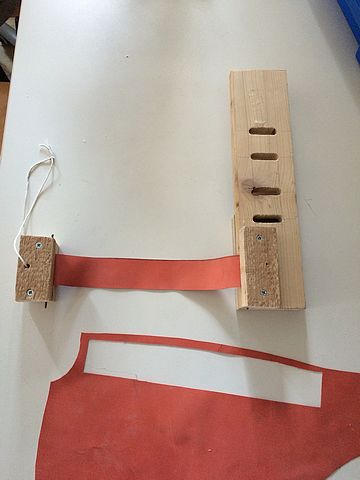
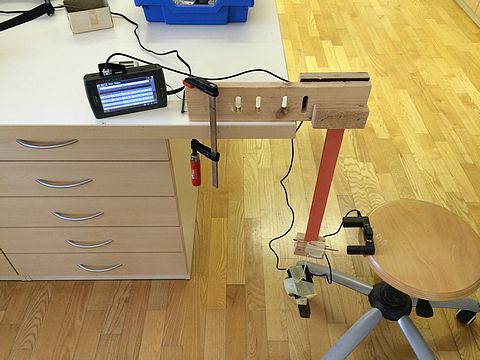
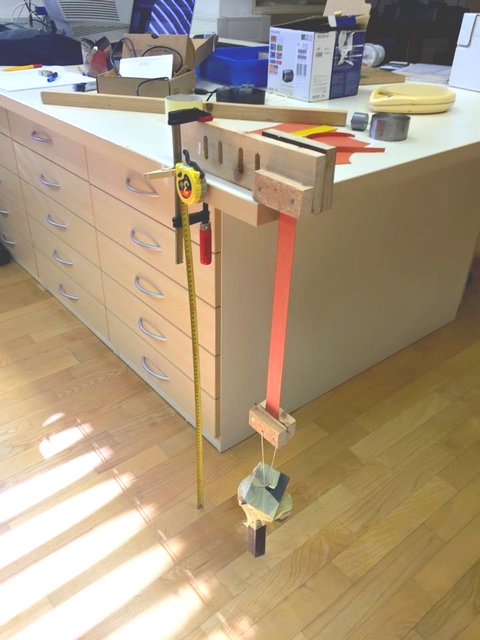
Potek poskusa: Najprej smo izrezali pravokoten kos gume ter napravili leseno vpenjalo, kamor smo čvrsto pritrdili gumo, tako, da je bilo efektivno raztegljive točno 26 cm gume. Da je bila konstrukcija karseda stabilna, smo naše vpenjalo pričvrstili v primež. Zamislili smo si obteževanje gume z utežmi. Ta poskus smo tudi delno izvedli, vendar smo kmalu ugotovili, da imamo na voljo premalo uteži, da bi lahko dovolj obremenili našo gumo, prav tako pa smo imeli težave z natančnim merjenjem raztezka (ki je bil primerno majhen zaradi majhne mase uteži), zato smo zasnovali nekoliko drugačen eksperiment. Odločili smo se, da bomo uporabili še nekoliko lesa ter zagotovili, da bo naše raztegovanje potekalo točno v navpični smeri (kar nam v prvi različici eksperimenta ni najbolj uspelo). Uporabili smo preprost lesen kvader, ki smo ga vlekli čisto ob robu mize, s čimer smo zagotovili, da gumijasti trak vlečemo navpično. Tako smo se izognili morebitnim poševnim silam in zapletenem računanju s komponentami ter koti. Nato smo na sprednji rob mize ob predalniku namestili merilo ter pripravili digitalni silomer Vernier, ki natančno meri silo, ki jo apliciraš na njegov senzor. Tako smo torej namesto uteži, s pomočjo merilnika, ki smo ga pričvrstili na omenjen leseni kvader, kar sami obremenjevali gumo, odčitavali raztezek ter rezultate sproti vnašali v instrument. Meritve smo opravili za širši gumijasti trak, na zadnjem srečanju pa smo opravili še nekaj kontrolnih poskusov z ožjim trakom ter na ta način potrdili naše prvotne rezultate.
Komentar fotografije: Na fotografiji manjka merilo. Med izvedbo poskusa spodnji del konstrukcije (pod vrvico) ni bil vpet, temveč smo ga vlekli navpično navzdol ob predalniku in tako povzročali silo - posledično se je gumijasti trak raztezal.
Fotografija poskusa:
Merjenje raztezka ob obremenitve gume z znano silo.
Avtor: Julijan Peric
Nihalo na gumijasto »vzmet«
Potrebščine: Guma (pravokotni trak 4 cm x 31 cm), les (za vpetje gume), vijaki, uteži, merilo, ravnilo, pisala, primež, štoparica, mobilni telefon, optična vrata, digitalni merilnik, računalnik, občutljiva tehtnica, kovinska cevka.
Kontrolne spremenljivke: m – masa uteži, t0 – nihajni čas, k – koeficient gume, l – dolžina gume.
Poskus je potekal pri sobnih pogojih.
Ideja: Želeli smo izmeriti nihajni čas »vzmetnega« nihala, kjer smo namesto vzmeti uporabili prožen trak gume enakih dimenzij kot pri prvem eksperimentu.
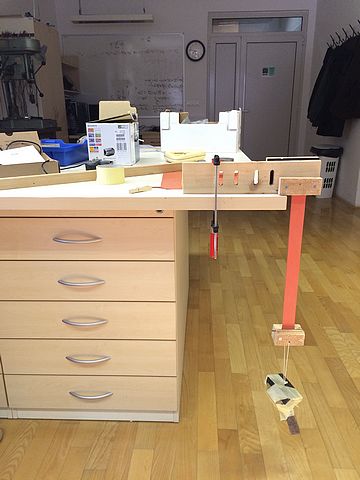
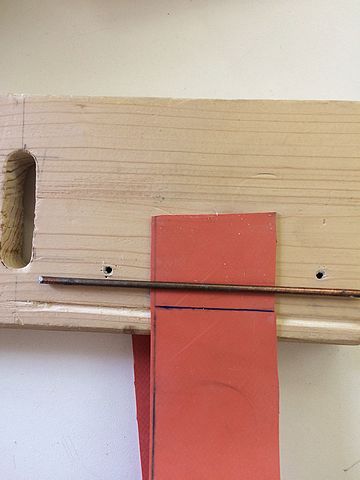
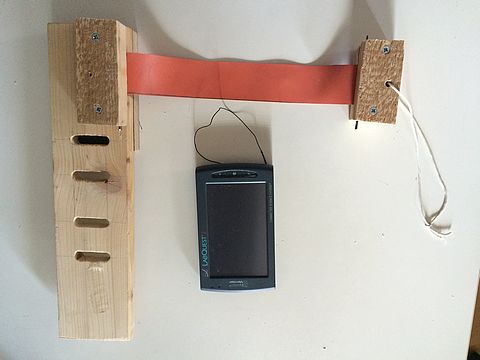
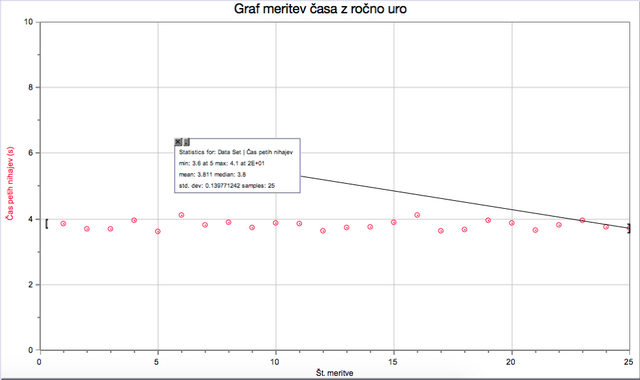
Potek poskusa: Konstrukcijo, ki smo jo izdelali na prvem srečanju, smo nekoliko preuredili in dodelali tako, da smo dobili nihalo na gumijasto vzmet. Nihalo smo nato obtežili z utežmi dovoljšne mase, da je bila amplituda nihanja dovolj velika, da smo lahko dokaj natančno razločili posamezne nihaje. Nato smo se lotili merjenja časa 5 nihajev s pomočjo štoparice ali mobilnega telefona, pri čemer je en član skupine zanihal nihalo, preostala člana pa sta po najboljših močeh merila čas. Po končani meritvi je sledila kratka analiza dobljenih rezultatov, kjer smo ugotovili, da je standardni odklon naših meritev prevelik, zato smo se odločili enak poskus ponoviti še s pomočjo optičnih vrat ter digitalnega merilnika časa. Potrudili smo se čim natančneje namestiti vrata, saj smo imeli nekaj težav s slabim zaznavanjem merilnika. Težavo smo čisto odpravili tako, da smo na nihalo v smeri proti optičnim vratom namestili ozko kovinsko cevčico, ki je služila kot sprožilec za optična vrata. Tudi ta poskus smo večkrat ponovili ter dobili zelo primerljive rezultate kot pri ročnem merjenju časa.
Fotografiji poskusa:
Prostoročno merjenje nihajnega časa.
Avtor: Julijan Peric

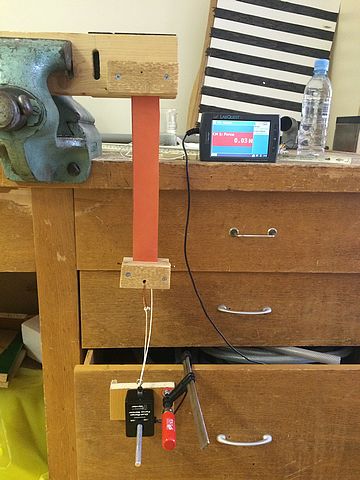
Merjenje nihajnega časa s pomočjo optičnih vrat.
Avtor: Julijan Peric
ANALIZA
Da bi si olajšali računanje koeficienta, smo pred izvedbo poskusa predpostavili, da za naš gumijasti trak velja linearni Hookov zakon, čeprav smo se zavedali, da je verjetnost za to pravzaprav majhna. A po nekaj meritvah smo ugotovili, da se trak razteza linearno, vendar v dveh posameznih območjih raztezka, zato smo se odločili, da ju obravnavamo ločeno. Preverili smo tudi, ali smo med poskusi prešli mejo linearnosti, vendar je bila guma dovolj čvrsta ter prožna, da nam to ni uspelo, četudi smo jo namerno zelo obremenjevali, se je vrnila v prvotno stanje. Iz tega lahko sklepamo, da nismo prešli meje linearnosti.
- območje raztezka: 0 cm – 7 cm
- območje raztezka: 7 cm – 20 cm
Podatke smo iz računalnika Labquest prenesli na namizni računalnik in jih obdelali s programom Logger Pro ter prišli do naslednjih rezultatov:
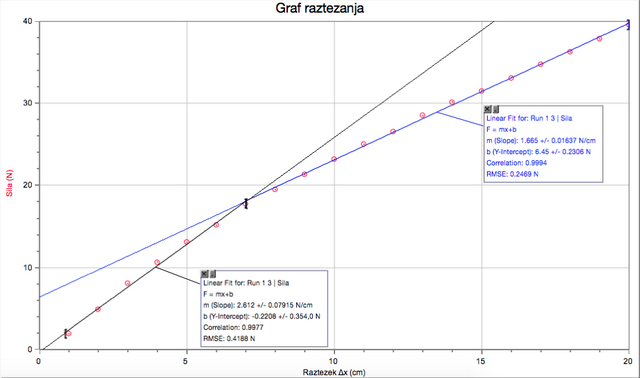
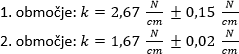
Iz grafa smo s pomočjo prilagoditvene linearne krivulje določili koeficienta k za vsako od območij:
Napako meritve smo izračunali po pravilu za računanje z napakami, pri čemer smo upoštevali napako digitalnega silomera, merila ter naše sposobnosti odčitavanja, prav tako pa smo vključili tudi napako linearnega približka. Merili in računali nismo v osnovnih enotah (N/m), vendar v (N/cm), ker so te enote glede na dolžino traku, ki smo ga uporabljali, in obremenitev, ki smo jih dosegali, najbolj primerne.
Na podlagi izsledkov prvega poskusa in nekaj kratkih preizkusov nihanja smo se odločili, da bomo tudi v tem primeru ločili dve območji raztezka. Zavedamo se, da smo s tem predpostavili, da se guma, oziroma njena deformacija, obnaša enako pri raztezanju in pri nihanju. Zaradi karakteristike drugega poskusa, to je nihala, kjer smo dobili vidno amplitudo nihanja le, če je bil trak dovolj obremenjen, smo se osredotočili na drugo območje, saj so bile meritve znotraj prvega območja pri naši natančnosti in sposobnosti odčitavanja praktično neizvedljive. Čeprav smo se zavedali, da je bilo nihanje dušeno, in se je amplituda manjšala, smo obenem vedeli, da se nihajni čas ne spremeni, s poskusi pa smo ugotovili, da je nihajni čas prvih treh nihajev skoraj enak.
Poskusne meritve nihajnega časa smo opravili s pomočjo mobilnih telefonov in ročnih ur, da bi čim bolj zmanjšali napako, ki je nastala zaradi zakasnelega reakcijskega časa ali prehitre ustavitve štoparice in težavnega odčitavanja ravnovesne lege.
Zaradi nenatančnosti meritev smo se odločili ponoviti poskuse še z optičnimi vrati. S tem smo dosegli karseda natančen nihajni čas.
| meritev 1 | meritev 2 | meritev 3 | meritev 4 | meritev 5 | povprečen čas | |
|---|---|---|---|---|---|---|
| t1 [s] | 0,802 | 0,806 | 0,796 | 0,803 | 0,801 | 0,802 +- 0,006 |
| t2 [s] | 1,599 | 1,607 | 1,593 | 1,606 | 1,603 | 1,602 +- 0,009 |
| t3 [s] | 2,396 | 2,405 | 2,382 | 2,400 | 2,397 | 2,396 +- 0,014 |
Iz tabele meritev smo ugotovili, da se nihajni čas kljub dušenju nezaznavno spreminja, hkrati pa smo uvideli, da so bila naše prostoročne meritve zadovoljivo natančne. Iz meritev smo po formuli izračunali prožnostni koeficient za primer, ko smo merili prostoročno in za primer, ko smo uporabili optična vrata:
V prvem primeru smo pri izračunu napake upoštevali naš reakcijski čas (štoparico smo lahko ustavili tako prehitro kot prepozno), nenatančnost odmerjanja, napako tehtnice ter napako časovnega merilnika, v drugem pa absolutno napako povprečne vrednosti, napako tehtnice ter optičnih vrat. Ker pa smo morali upoštevati pravilo najšibkejšega člena, smo se ocene in izračuna napak lotili nekoliko poenostavljeno, pri čemer smo v prvem primeru upoštevali le napako rekcijskega časa, v drugem pa smo ocenili napako zaradi težave pri nameščanju optičnih vrat.
PRIMERJAVA
Ker smo lahko oba poskusa zanesljivo opravili le v drugem območju, se bomo tudi pri primerjavi osredotočili le na to območje. Rezultati prvega območja so zapisani zgoraj v rubriki Analiza.

Primerjava izračunanih koeficientov prožnosti za drugo območje raztezka. Modro ozadje pomeni 1. poskus, rdeče pa 2. poskus.
Ob primerjavi rezultatov za prožnostni koeficient gume, ki smo jih dobili s pomočjo dveh neodvisnih poskusov, smo ugotovili, da se le-ti v okviru napake skoraj ujemajo, s čimer lahko delno potrdimo pravilnost naših metod. Nekoliko večje je odstopanje, kjer smo koeficient določili s pomočjo ročnega merjenja časa, za kar je kriva predvsem naša nenatančnost. K neskladnosti rezultatov obeh poskusov pa nekoliko pripomore tudi dejstvo, da smo točke na x-osi (definirali smo raztezek x v centimetrih) pri merjenju z merilnikom sile v ta inštrument vnašali ročno, pri čemer se je sila lahko nekoliko spremenila, če je izvajalec eksperimenta pri tem popustil ali dodatno raztegnil gumo, ko je vpisoval vmesno meritev. Razen tega smo pri drugem eksperimentu imeli manjše težave z nameščanjem in zaznavo optičnih vrat, saj se je nihalo v nekaj primerih zraven navpičnega nihanja nekoliko gugalo. Seveda pa je lahko vzrok za tako večjo kot tudi manjšo razliko med dobljenima rezultatoma dejstvo, da smo si umislili dve območji raztezka, ki sta bili definirani le s približno natančnostjo enega centimetra. Če bi merili z večjo natančnostjo, bi morda ugotovili, da se območja nekoliko razlikujejo od tistih, ki smo jih dobili, s čimer pa bi se razlikoval tudi koeficient raztezka v tem območju. Do neke mere je za razliko lahko kriva tudi sama guma, saj smo v obeh primerih uporabili isti gumijasti trak in bi lahko že prišlo do manjše deformacije, ki pa je mi z našimi opazovalnimi in merilnimi sposobnostmi ne bi zaznali. Za neskladnost rezultatov pa je lahko kriva tudi naša predpostavka, da se guma tako pri linearni deformaciji kot pri nihanju obnaša enako in da je območje njenega raztezka deljeno na dva linearna intervala. Verjetno je, da je naša hipoteza le delno pravilna, kar bi pomenilo, da smo se nekoliko preveč zanašali na rezultate prvega poskusa.
Zavedamo se, da so nekatere napake, v našem primeru napaka reakcijskega časa ter nenatančnosti odmerjanja, človeški napaki, ki sta popolnoma naključni. Tako lahko oseba zaradi kratke miselne odsotnosti, ali pa preprosto zaradi nepozornega izvajanja eksperimenta napravi povsem naključno napako, ki se je običajno niti ne zaveda. Tudi nam se je nekajkrat pripetilo, da je kateri od članov skupine opazoval delo druge skupine ali pa poslušal pogovor asistentov in pri tem nehote prepozno pritisnil na štoparico. Čeprav smo ocene vseh naključnih človeških napak v poročilu zaokrožili navzgor, in sicer smo uporabili le napako, ki je najbolj vplivala na nenatančnost meritev, smo jih skušali čim bolj zmanjšati tako, da smo vse meritve opravili vsi člani skupine in to večkrat zaporedoma, vsaj v večini primerov. Seveda pa obstajajo tudi inštrumentalne nedoločenosti, ki so posledica same izdelave in sposobnosti merilnih naprav ter se jim je nemogoče izogniti, še težje pa jih je sploh odkriti. V primerjavi s človeškimi so pogosto neznatne, a lahko zaradi svoje neizsledljivosti podajo popolnoma napačen končni rezultat. A ker smo merilnike testirali, npr. digitalni silomer smo obremenili, nato pa smo težo iste uteži merili še z vzmetnim silomerom, smo prepričani da so naši merilniki delovali brezhibno, zato so odstopanja med rezultati, ki so nastala, večinsko posledica naše netočnosti, najbolj neustreznega reakcijskega časa, zaradi katerga smo dobili pri prostoročnem merjenju nihajnega časa znaten standardni odklon.
Če se osredotočimo na konkretne številke, ugotovimo, da smo pri prostoročnem merjenju napravili okoli 20 – odstotno napako, saj je razlika med minimalnim in maksimalnim izmerjenim časom 5 nihajev znašala več kot 0.5 sekunde, kar pomeni, da je ta meritev najbolj nezanesljiva. Za razliko od tega pa je bila napaka pri digitalnem merjenju nihajnega časa le nekaj odstotna, in sicer približno 3 - odstotna, saj smo merili z zanesljivimi orodji z dobro natančnostjo. V tem primeru je k napaki največ doprinesla majhna težava z zaznavanjem optičnih vrat, zato smo to napako približno ocenili. Tudi digitalni silomer, ki smo ga uporabljali pri prvem poskusu, je s svojo točnostjo naši meritvi doprinesel le majhno nedoločenost. Napaka, ki je najbolj vplivala na izkrivljenost rezultata v tem primeru je bila težava s sprotnim vnašanjem meritev v silomer (za razlago preberi opis poteka prvega poskusa). A ker se je sila razlikovala za največ 3 desetinke N (ugotovljeno s pomočjo opazovanja), je to pri izračunu naneslo okoli 5 - odstotno napako v prvem območju in okoli 2 - odstotno v drugem. Razlika je zaradi manjših velikosti sil v prvem območju. Zato lahko zaključimo, da je najmanj natančna meritev tista, ki smo jo opravili prostoročno. Tudi v resnici ta rezultat od vseh najbolj odstopa. Ob izračunu standardnega odklona lahko vidimo, da v primeru prostoročnih meritev znaša skoraj 0`14, medtem ko pri meritvi s pomočjo optičnih vrat znaša manj kot 0`005. To ponovno potrjuje, da je slednja meritev izmed vseh najbolj natančna in zanesljiva. Dodatno pa se lahko prepričamo tudi z izračunom povprečne vrednosti vseh koeficientov drugega območja, ki znese 1,8 N/cm, pri čemer ugotovimo, da koeficient, ki izhaja iz meritev nihajnega časa s pomočjo optičnih vrat, najmanj odstopa od povprečja.
Ob pogledu na končne rezultate (glej spodnjo sliko) lahko vidimo, da se le-ti (z upoštevanjem nezanesljivosti) ne ujemajo najbolj. Prostoročna meritev nihajnega časa nam res da koeficient, ki se v okviru napake ujema z ostalima dvema koeficientoma, vendar je ta meritev izmed vseh najbolj nezanesljiva. Podobno ob pogledu na preostala dva koeficienta opazimo, da se intervala rezultatov (z vključeno absolutno napako) ne prekrivata, nimata skupnega preseka, kar pomeni, da se rezultata ne ujemata. Izkaže se, da se rezultati ne ujemajo, vendar so si podobni, sploh tista dva, ki smo ju pridobili s pomočjo digitalnega silomera ter optičnih vrat. Edini razlog, ki ga lahko navedemo za neujemanje teh dveh koeficientov tiči v že nekajkrat omenjeni težavi pri vnašanju meritev digitalnega silomera. Za razliko od optičnih vrat, ki so same zajemale čas, je izvajalec poskusa zraven natezanja silomera vanj tudi sam sproti vnašal rezultate, pri čemer je silomer nehote čisto malo popustil, zaradi česar je izmerjena sila znašala manj kot bi pri popolnoma natančni meritvi. Iz tega razloga je tudi izračunani koeficient morda nekoliko manjši kot je dejanski. Ima pa po drugi strani koeficient prostoročne meritve nihajnega časa najverjetneje preveliko vrednost, saj smo izvajalci eksperimenta v strahu, da bomo prepozno ustavili uro, in zaradi težavnega štetja nihajev očitno prehitro ustavili uro, ker pa je bil nihajni čas krajši kot v resnici, je koeficient z izračunom prišel večji. Ne moremo izključiti niti možnosti, da smo štoparico ustavili prepozno, kar se sicer bolj sklada z lastnim prepričanjem, da imamo ljudje slabo odzivnost, vendar meritev z optičnimi vrati potrjuje, da pri naših prostoročnih meritvah to ne velja. Ostalih razlogov za odstopanje nismo našli, zatorej lahko potrdimo, da se rezultati v našem primeru ne ujemajo, čeprav so si dokaj podobni in bi jih lahko z natančnejšimi meritvami morda še bolj približali.
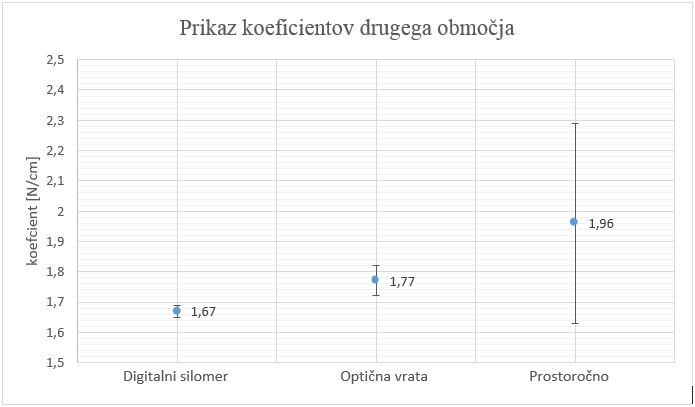
Na spodnjem grafu so izrisani vsi dobljeni koeficienti k za drugo območje raztezka, saj smo edinole v tem območju lahko opravili zanesljive meritve in se prepričali o pravilnosti naših domnev.
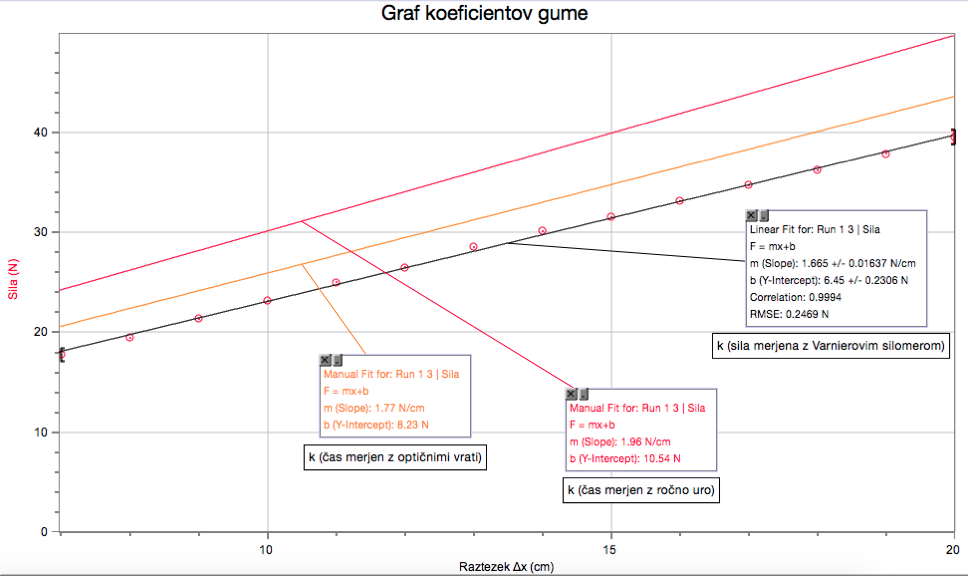
Komentar fotografije: Črna premica je aproksimacija meritev z digitalnim silomerom, rdeča in oranžna pa ne vsebujeta točk (meritev), saj sta koeficienta v teh dveh primerih izračunana in ne direktno izmerjena ter sta zgolj ponazoritev, kako bi meritve potekale. Koeficient raztezka k je naklon premic (Slope).
Po kratkem premisleku lahko potrdimo smiselnost rezultata, saj je guma, ki smo jo uporabljali v našem primeru precej prožna in raztegljiva, zato je dobljeni koeficient raztezka pravzaprav zelo primeren in se sklada z našimi opazovanji. Gumijasti trak smo pred in med eksperimentoma večkrat poskusno raztegnili ter opazovali njegovo obnašanje. Tako smo na primer gumo nekajkrat pošteno nategnili in preverili, ali se ni morda deformirala, prav tako pa smo nekajkrat obremenili gumo z znano težo ter opravili nadzorno in preizkusno meritev, da smo preverili, ali so naši dotedanji rezultati res smiselni. Tudi po končanih eksperimentih smo preverili, da je guma še vedno v prvotnem stanju in se tako prepričali, da so naši matematični modeli, ki smo jih uporabili pri izračunu koeficienta res popolnoma primerni. V zaključku lahko ugotovimo, da zaradi precej večje merske nedoločenosti pri prostoročnem merjenju nihajnega časa tudi rezultat znatno odstopa od ostalih dveh. A ker smo se prepričali o pravilnosti naših predpostavk, lahko zaključimo, da smo oblikovali dva ustrezna in neodvisna poskusa, ki se dobro skladata v dobljenih rezultatih. Naša temeljna ugotovitev je, da gumijasti trak, ki smo ga uporabljali pri naših eksprerimentih, dobro uboga linearni Hookov zakon, a v dveh ločenih območjih, sami pa smo to s poskusi potrdili le za drugo območje. Ker smo vse poskuse izvedli tako, da smo čim bolj zmanjšali nedoločenosti, lahko torej precej zanesljivo potrdimo pravilnost naših meritev in rezultatov. Naša ugotovitev je seveda ključnega pomena, saj smo s tem potrdili enega izmed osnovnih zakonov fizike, Hookov zakon, ki velja le v določenih pogojih – za nateg in stisk. Tudi naše deformacije so v glavnem vključevale le omenjeni dve.
REFLEKSIJA
Za razliko od večine drugih predmetov, Projektno delo spodbuja ekipno delo, sodelovanje, iznajdljivost in praktično delo. Med izvajanjem projekta smo se naučili marsikaj zanimivega, vse od zbiranja primernih idej do njihovega udejstvovanja, pa tudi veliko ročnih spretnosti, natančnega popisovanja in merjenja, zavedanja pomanjkljivosti in predpostavk, analize podatkov in še mnogo več. Z nekaj osnovnimi pripomočki smo napravili različna eksperimenta, ki sta kljub svoji preprostosti dala zavidljivo natančen rezultat. Še najpomembneje, naučili smo se delovanja s kolegi, razdeljevanja dela in pristnih prijateljskih odnosov.
GALERIJA