

Teorija
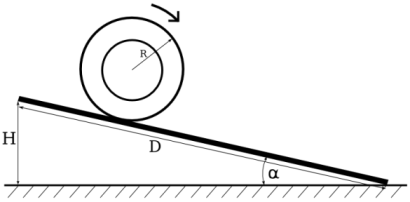
Klanec
Naj bo R zunanji polmer gume, m pa naj bo masa gume. Začetno višino označimo s h0, kot med desko in tlemi z α, z r pa označimo koordinato merjeno po deski od vznožja. Privzamemo še, da se guma kotali brez drsenja. Tedaj velja:
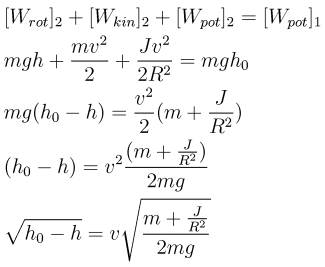
Velja še:
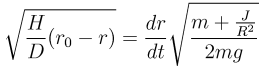
Integriramo od začetnih t0 in r0 do tekočih parametrov t in r:
Tako dobimo:
To funkcijo r(t) smo izpeljali zato, da lahko pravilno opišemo gibanje. Parametre prilagodimo dobljenim podatkom.
Torzijsko nihanje
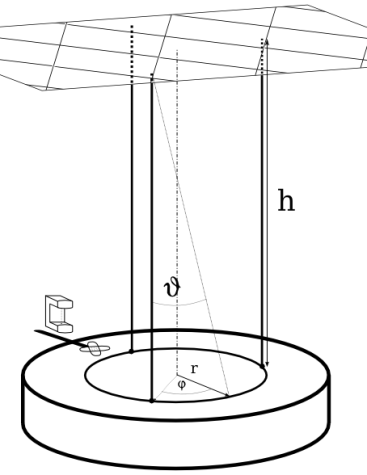
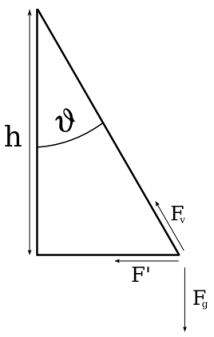
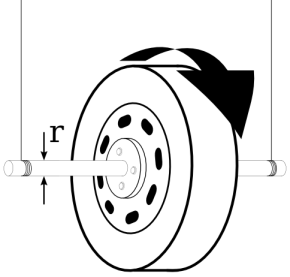
Spet naj bo R zunanji, r pa notranji polmer gume (kjer so tudi pritrdišča vrvi); h je dolžina vrvi, na katere je obesena guma, m pa je masa gume.
Gumo zamaknemo v njeni ravnini za nek kot φ. Tedaj se posamezna vrv premakne za nek kot ϑ, in za majhne odmike velja približno: hϑ ≈ rφ
Ko gumo zamaknemo, jo v ravnovesno lego sili samo F'. Če je guma obešena za n vrvi, velja:
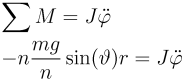
Aproksimiramo: ![]()
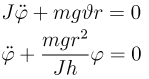
Vemo še: 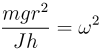
Tako dobimo: 
Jo-jo
Naj bo tokrat r polmer osi, okoli katere sta naviti vrvi; m je masa gume in v hitrost težišča. Velja:

Integriramo od začetnih t0 in h0 do tekočih parametrov t in h:
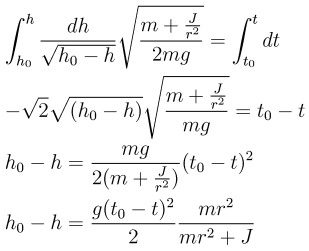
Tako dobimo: 
To funcijsko odvisnost smo želeli dobiti iz istih razlogov kot pri klancu.
Ker smo pri poskusu uporabili gumo skupaj s platiščem, smo tako dobili vztrajnostni moment obeh skupaj. Zato smo poskus ponovili tudi samo s platiščem in tako izračunali njegov vztrajnostni moment, ki smo ga odšteli od skupnega vztrajnostnega momenta.