Kljub nekaterim težavam, ki smo jih imeli z elektroniko smo uspeli prepričati teleskop, da se obrača kamor želi računalnik. Na koncu se nismo odločili da bi teleskop upravljali preko Bluetooth modula, saj če bi teleskop upravljali brezžično bi potem morali še poskrbeti za napajanje koračnih motorjev, kar se nam pa ni zdelo posebej smiselno. Potrebno je bilo samo še izmeriti kako hitro se je sposoben naš sistem vrteti oz. kako dolgo moramo čakati da se zavrti za določen kot na nebesni krogli.
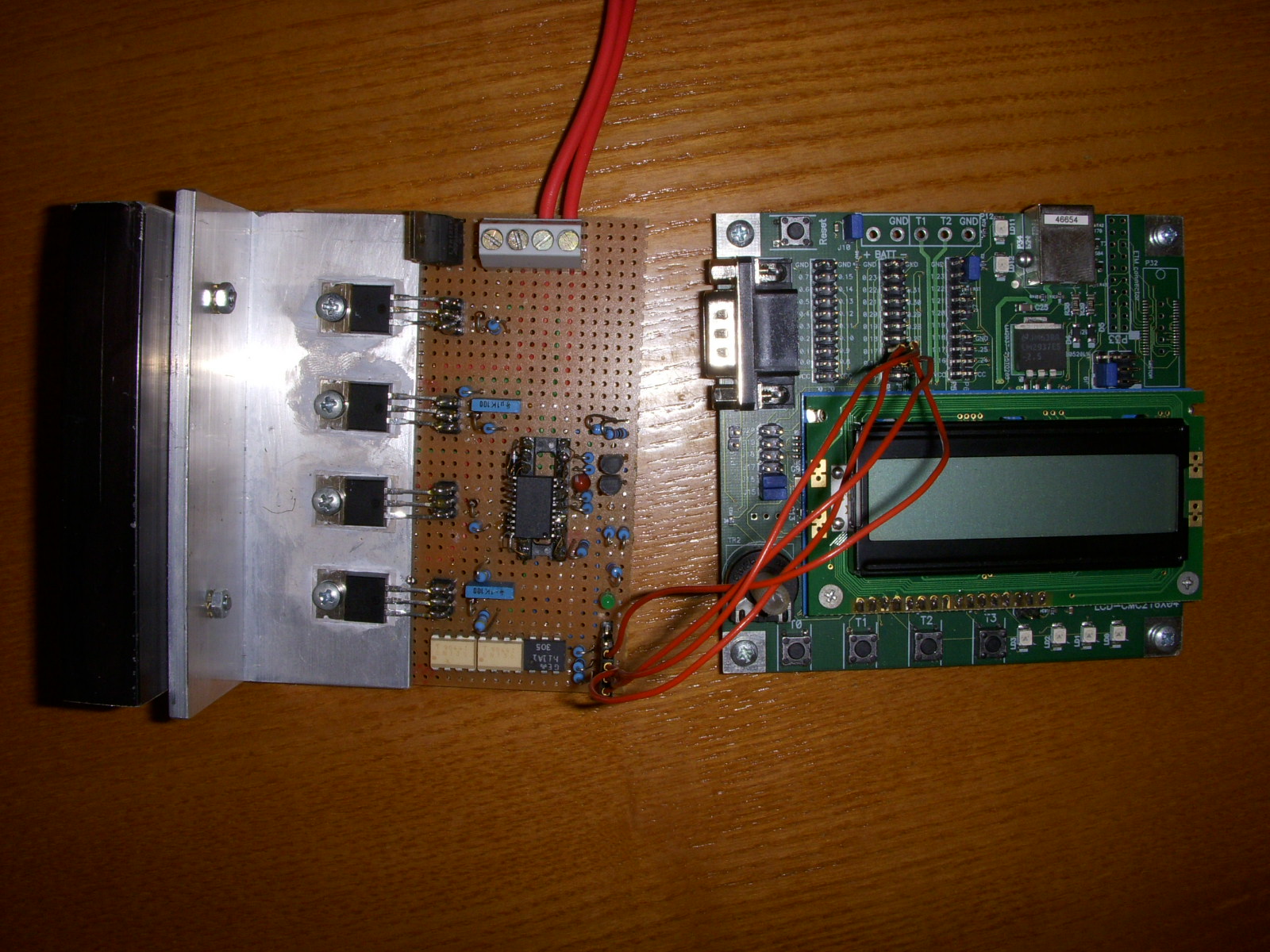
Slika 4: Vmesnik med računalnikom in koračnimi motorji, ki obračajo teleskop
Hitrost obračanja
Merili smo čas, ki ga je potreboval teleskop, ko smo ga poslali za 5° po deklinaciji in 20 minut po rektascenziji, kar je tudi enako 5° na nebesni krogli (1° = 4min).
Meritev |
t[s] |
1. |
3,925 |
2. |
3,722 |
3. |
3,745 |
4. |
3,788 |
5. |
3,831 |
Povprečje |
3,802 |
Meritve nam povejo, da se teleskop lahko obrača z maksimalno hitrostjo 1,3°/s. Kar pomeni, da cel obrat opravi v okoli 4,5 min.
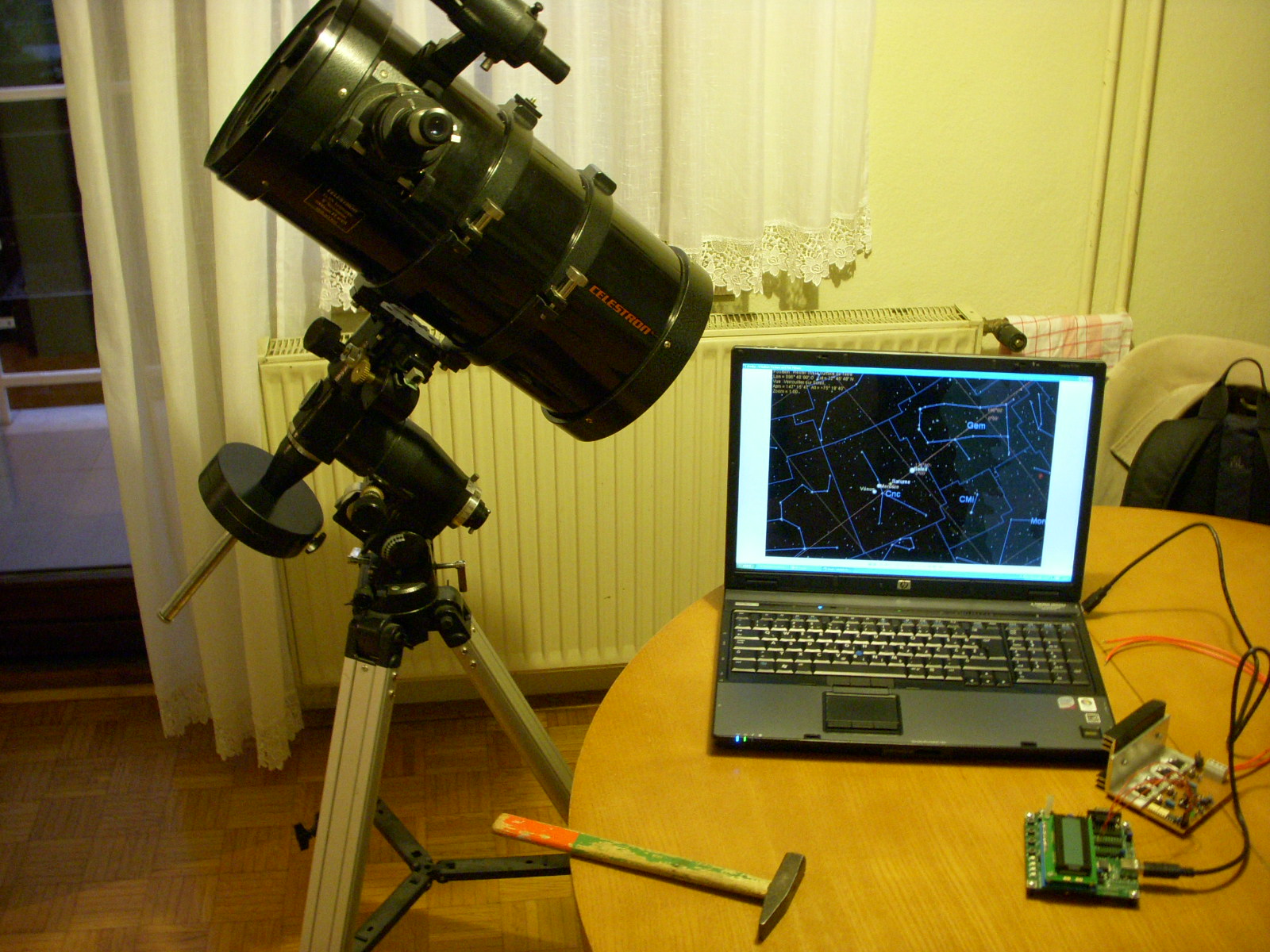
Slika 5: Priprave na meritev hitrosti obračanja (s kladivom?!)
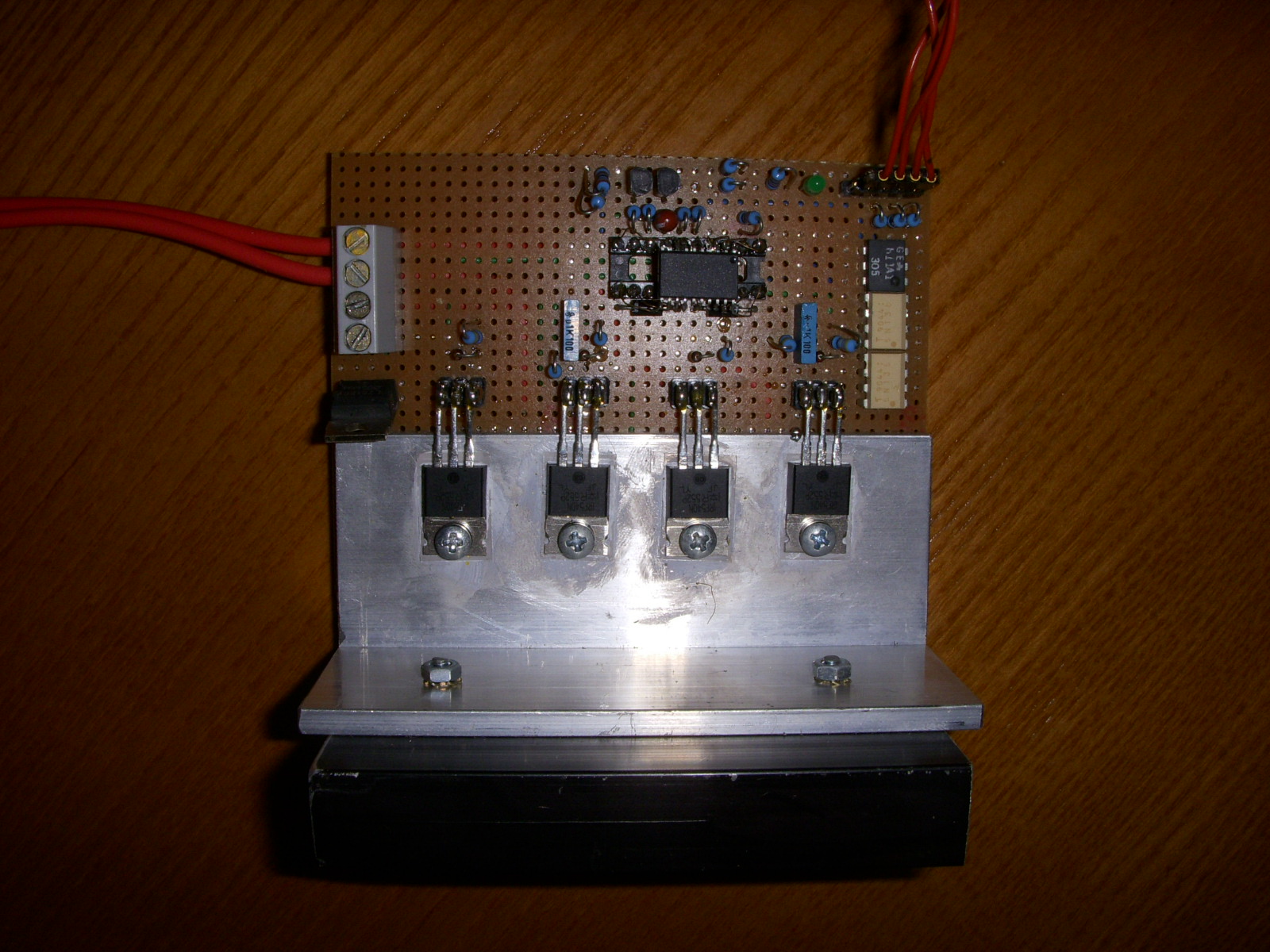
Slika 6: Vezje s H-bridgei, ki krmilijo motorje

Slika 7: Teleskop v premikanju s polno hitrostjo