Nebesni koordinatni sistemi
Nebesni koordinatni sistem uporabljamo pri orientaciji po nebu in za posplošeno, vsem enako določanje točne lege zvezd. Ker se Zemlja vrti okoli svoje osi imamo občutek, da se zvezde vrtijo okoli nas, zato je osnovna ideja vsakega nebesnega koordinatnega sistema preslikati zvezde na tako imenovano nebesno kroglo. Nebesno kroglo si predstavljamo kot sferičen ovoj okoli Zemlje, če povežemo središče zvezde s središčem naše Zemlje, bi sliko zvezde na nebesni krogli videli pri presečišču premice.
Poznamo več nebesnih koordinatnih sistemov (razlikujejo se po tem kako razpolovijo nebesno kroglo):
- Ekliptični koordinatni sistem za osnovno ploskev uporablja ekliptiko Sonca, to je ravnina po kateri Zemlja kroži okoli Sonca,
- Galaktični koordinatni sistem nebesno kroglo razpolovi z ravnino naše Mlečne ceste,
- Podobno Supergalaktični koordinatni sistem nebesno kroglo razpolovi z ravnino bližnjih jat galaksij z našo v središču, vendar sta galaktični in supergalaktični zelo redko uporabljena med amaterskimi astronomi, saj sta primerna za kartiranje oddaljenih nebesnih objektov,
- Horizontni sistem uporablja lokalno ravnino horizonta in je za vsakega opazovalca na drugem mestu na Zemlji različna, torej so koordinate odvisne od geografske širine in dolžine opazovalca. Slabost tega sistema je da so koordinate odvisne od časa v letu, vendar je sistem še vedno v uporabi.
- Ekvatorski koordinatni sistem je za naš primer najbolj uporaben, saj nebesno kroglo razdeli z ravnino ekvatorja, to pa pomeni, da se ta sistem vrti enako kot Zemlja, torej za sledenje zvezde spreminjamo le eno koordinato.
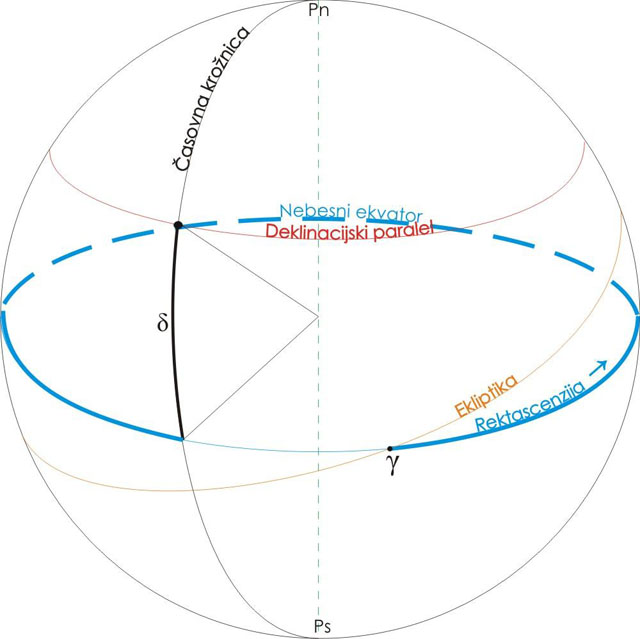
Ekvatorski koordinatni sistem
Ekvatorski koordinatni sistem za opis lege uporablja dve koordinati. Z δ označimo deklinacijo, ki nam pove za kakšen kot je nebesno telo nad ravnino ekvatorja Zemlje. Merjena je od ekvatorja pa do 90° severno (severni nebesni pol) ter 90° južno (južni nebesni pol). Deklinacija nebesnega telesa nad nebesnim ekvatorjem ima predznak +, deklinacija telesa pod nebesnim ekvatorjem pa -. Ta količina je za vsako zvezdo skozi čas nespremenjena, če ne upoštevano vrtenja Zemljine osi (precesije), ki pa je za naše razmere zanemarljiva. Definirajmo še deklinacijski paralel, to je krožnica na nebesni krogli z isto deklinacijo. Z γ označimo rektascenzijo. Ta nam pove razdaljo od pomladišča (presečišče ekliptike z ekvatorjem) do časovne krožnice (krožnica na kateri se nahajajo severni, južni pol in opazovani nebesni objekt). Meri se v nasprotni smeri urinega kazalca v urah, minutah in sekundah (24 ur je enako 360°).
Nastavitev teleskopa za uporabo:
Preden začnemo uporabljati sistem moramo poskrbeti da je os rektascenzije poravnana z osjo vrtenja Zemlje, oz. osjo vrtenja nebesne krogle. To dosežemo tako da teleskop usmerimo proti Severnici, nastavimo naklon in deklinacijo, nato pa bi morala ustrezati vsaka rektascenzija za opazovanje Severnice. Ko je torej Severnica v centru vidnega polja in se ob spreminjanju rektascenzije ne premika je os poravnana. Nato si v programu TheSky izberemo zvezdo, ki je blizu objektu ki ga želimo opazovati in seveda ki jo prepoznamo na nebu. Teleskop obrnemo proti tej znani izhodiščni zvezdi in potrdimo da smo obrnjeni v tisto smer v programu TheSky. Naslednja izbira v TheSky-u nam obrne teleskop do željenega objekta.
Komunikacija s kontrolnim modulom
Program komunicira s kontrolnim modulom preko serijskega vmesnika. Protokol komunikacije je bil implementiran z obstoječim gonilnikom za LX200 kar nam je omogočilo hitrejši razvoj vmesnika. Podrobnosti protokola lahko najdete tukaj. Po sprejetju ukaza za premik na koordinato, kjer se nahaja objekt, modul izračuna število potrebnih korakov za ta prekmik in obenem upošteva stalno vrtenje zamlje.
Kontrolni modul
Kontrolni modul vsebuje komponente, ki so potrebne za krmiljenje teleskopa. Program, ki skrbi za beleženje trenutne lokacije, premik na podano koordinato in nadzor koračnih motorjev se nahaja na mikrokontrolerju ATMEGA88. Ta je "srce" modula. Mikrokontroler sprejema podatke preko serijskega vmesnika direktno iz programa in s temi koordinatami izračuna premik, ki se prevede v število korakov, nato pa ga pošlje moduloma za nadzor koračnih motorjev.
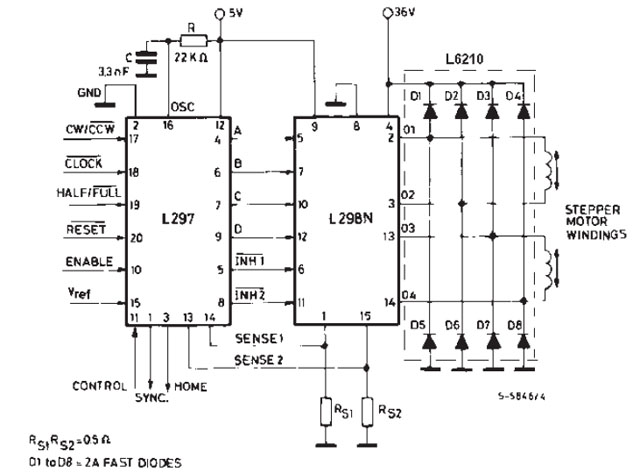
Nadzor koračnih motorjev
Glavni komponenti za nadzor koračnih motorjev sta L297 in L298. Kontrolni modul je povezan na L297 preko pinov 17 (CW,CCW), 18 (CLOCK), 19 (HALF/FULL) in 10 (ENABLE). Preko teh nadzira številko korakov na časovno enoto, smer vrtenja, način delovanja, omogoča pa tudi izlop celotnega nadzornega modula.