Izvedli smo dva eksperimenta, pri katerih smo uporbljali naslednje pripomočke:
- fotoaparat
- meter
- 2 vzmeti z različnimi koeficienti
- različne uteži
- nitka
- žica ------------------
- voziček
- enkoder
- Arduino
- optični senzor
1. Eksperiment
a) Prvo nihalo
Namen prvega eksperimenta je bilo opazoavanje nihala v pospešenem sistemu,
v katerem se pospešek spreminja - utež višje zaradi nihanja vedno drugače vpliva na pospešek spodnje uteži.
Naredili smo ozadje z merilom in na uteži narisali kontrolne črtice, da smo lahko čim bolj natančno odmerili odmike.
Naša ideja je bila, da bi videje računalniško obdelali s programom, ki utežem sledi v videju in izpisuje odmike .
Našli smo program, ki je bil podoben, kot temu kar smo potrebovali in ga malo predelali da je delal za naše primere (vir (3.4.2018)).
Začeli smo s sklopljenim vzmetnim nihalom (k1 in k2), ki smo ga obesili z mize.
Naša ideja je bila, da za nihalo postavimo »belo steno«, tj. list z merilom, s fotoaparatom
posnamemo nihanje in na računalniku pregledamo odmike.
Tako smo posneli video nihanj pri različnih obtežitvah npr. zgoraj 100g, spodaj 25g, in obratno. Prav tako smo med poizkusom zamenjali vzmeti,
tako da je bila za polovico poizkusov na vrhu vzmet k1 , za drugo polovico pa vzmet k2.
Slika 1 - Sklopljeno nihalo iz dveh vzmeti
b) Drugo nihalo
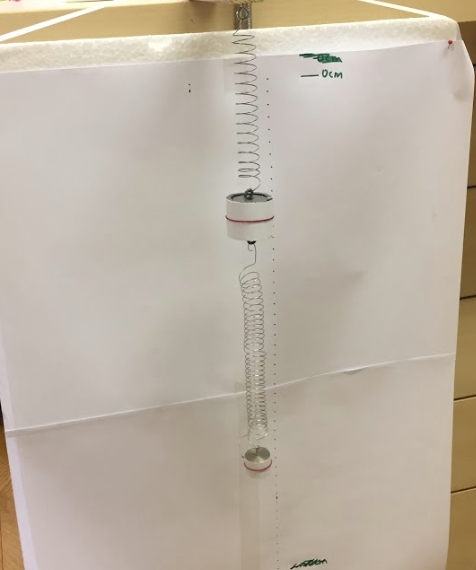
Za drugo sklopljeno nihalo smo si izbrali nitno nihalo z žico (ki smo jo obravnavali kot nit - tehta le nekaj gramov) in nitjo.
Potek drugega dela prvega eksperimenta je bil popolnoma enak kot prvi del,
le da smo namesto vzmeti za povezavo vzmeti uporabili nitko in žico (obe sta bili na obeh pozicijah - vrh in dno).
Prav tako smo posneli videje, ki smo jih pozneje obdelali - v tem primeru je dalo sledenje uteži v videjih zelo slabše rezultate.
Slika 2 - Sklopljeno nihalo iz vrvice in žice

Animacija 1 - Kaotično nihanje sklopljenega matematičnega nihala, vir (20.5.2018).
2. Eksperiment
Namen tega eksperimenta je bilo opazovanje nihala v pospešenem sistemu, kjer je pospešek konstanen, saj to poenostavi problem.
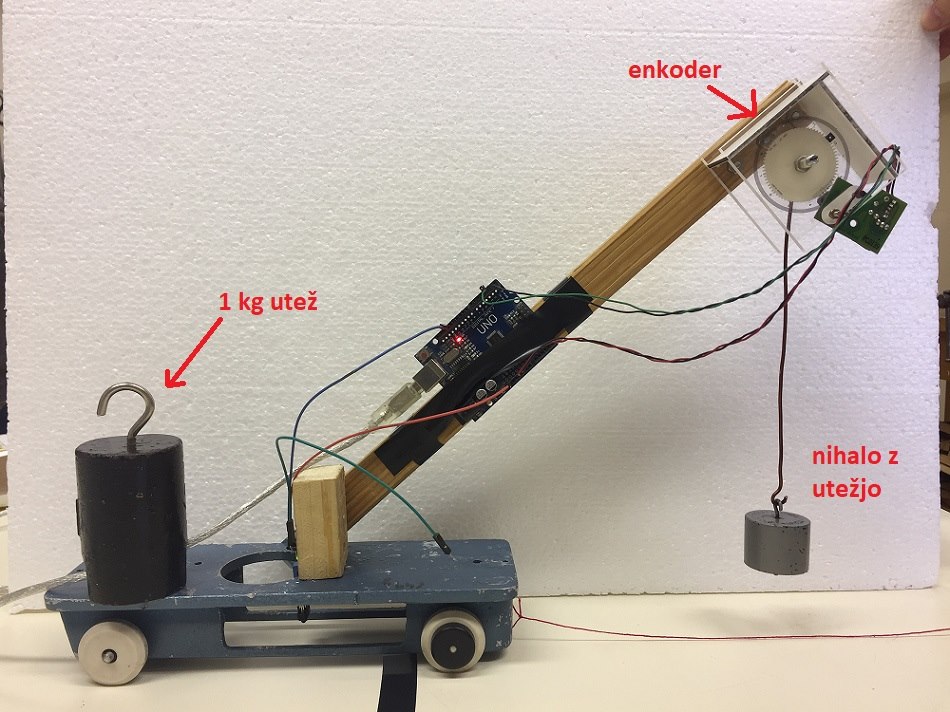
Na voziček (slika 3) smo dali nihalo, ki smo ga izdelali sami. Na sistem smo pritrdili senzorje, ki so nam merili
odmike nihala od ravnovesne lege (enkoder), optični senzor na dno vozička in Arduino (pošilja podatke računalniku - plav mikrokontroler na sredi lesene palice).
Voziček smo postavili na mizo in ga z nitjo preko škripca povezali z
utežjo (m2), ki je visela z mize, tako da je utež voziček s silo teže pospeševal. Eksperiment smo izvedli pri različnih vrednostih m2.
Prav tako smo na mizo na razdalji d (1,37m +- 5 %) prilepili 2 črna trakova, ki jih je zaznal optični senzor (pritrjen na spodnji strani vozička)
- prvi trak je pomenil začetek meritve, drugi pa konec. To nam je omogočilo, da smo izmerili čas, v kateri je voziček prepotoval dolžino d - iz tega pa lahko dobimo pospešek vozička.
Za začetek eksperimenta smo istočasno zanihali nihalo in spustili utež na škripcu, da je začela padati. Voziček smo pustili da se pelje, dokler ni šel preko druge črne črte na mizi - po smo ga ustavili.
Slika 3 - Voziček z nihalom
Izboljšave poizkusov
1. Eksperiment: Pri meritvah je prišlo do pomankljivosti pri natančnosti analiziranja videov - Lahko bi uporabili boljši program za sledenje gibanja (oz. izboljšali našega).
Prav tako bi lahko uporabili kamero, ki ima boljšo ločjlivost in lahko snema več sličic na sekundo.
Bolj natančno bi bilo tudi, če bi poskus ponovili večkrat z enakim začetnim odmikom, da bi bili povprečni rezultati bolj natančni.
Do velike spremembe bi tudi prišlo, če bi uporabili enake uteži in enake vzmeti, saj to zelo poenostavi primerjanje meritev z matematičnim modelom.
2. Eksperiment: Čas bi lahko merili na več točkah, kar bi nam dalo bolj realistično sliko pospeška uteži na škripcu na voziček. Za pospešek smo privzeli, da je konstanten, kar morda ni res. To lahko vodi do odstopanj pri meritvah.
Prav tako, pa je bila težava v tem, da se voziček ni vozil popolnoma naravnost, kar bi lahko popravili tako, da bi ga postavili na fiksne tirnice.
Kriva vožnja vplivala na pospešek vozička in s tem na celotno nihanje. Pomagalo bi tudi, če bi uporabili težji voziček, saj bi na premikanje
vozička suvanje nihala levo in desno relativno manj vplivalo. Poleg tega bi lahko uporabili merilnik pospeška, ki bi nam omogočil
zelo natačno meritev pospeška.