1. Eksperiment
| # | Utež [g] | Koeficient vzmeti [N/m] | Nihajni čas [ms] |
|---|---|---|---|
| 1 | 100 | 38,23 \(\pm \) 0,41 | 321,3 \(\pm \) 88 |
| 2 | 100 | 3,635 \(\pm \) 0,064 | 1042 \(\pm \) 288 |
| 3 | 50 | 38,23 \(\pm \) 0,41 | 227 \(\pm \) 125 |
| 4 | 50 | 3,635 \(\pm \) 0,064 | 737 \(\pm \) 404 |
-
-
A - zgornje nihalo
-
B - spodnje nihalo
\(2520 - k_2, m_2, k_1, m_2 \) - sklopljeno nihanje dveh vzmeti.
-
-
-
A - zgornje nihalo
-
B - spodnje nihalo
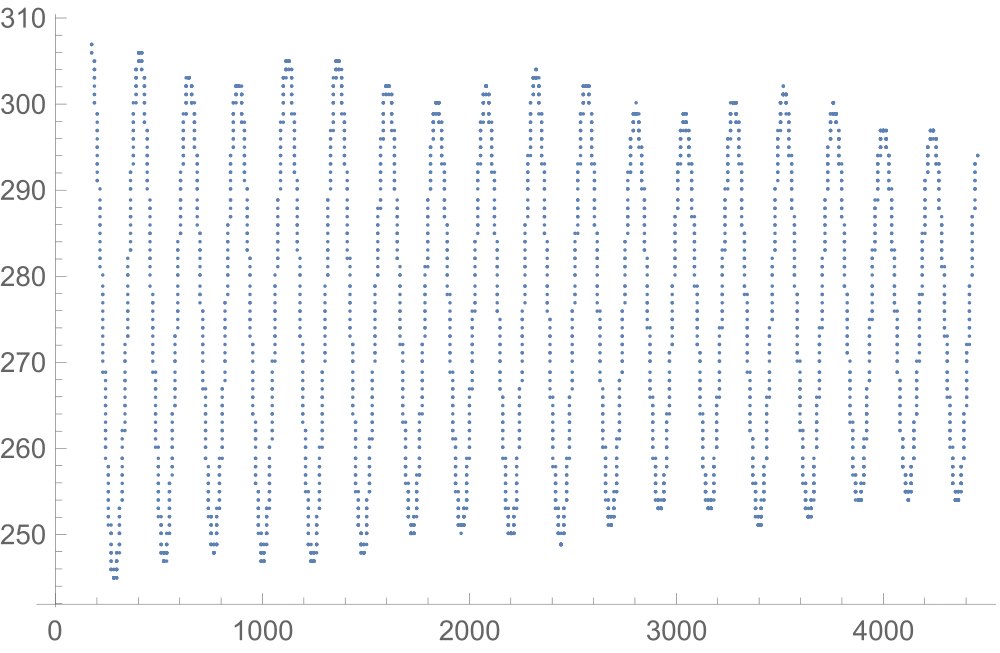
\(2515 - k_1, m_2, k_2, m_2 \) - sklopljeno nihanje dveh vzmeti.
-
-
-
A - zgornje nihalo
-
B - spodnje nihalo
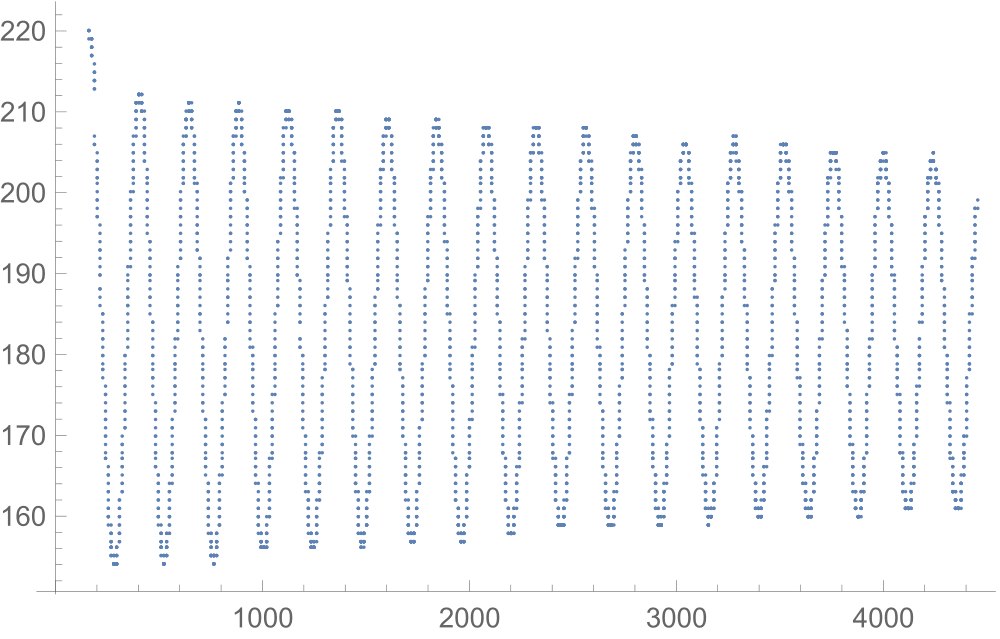
\(2503 - k_1, m_1, k_2, m_1 \) - sklopljeno nihanje dveh vzmeti.
-
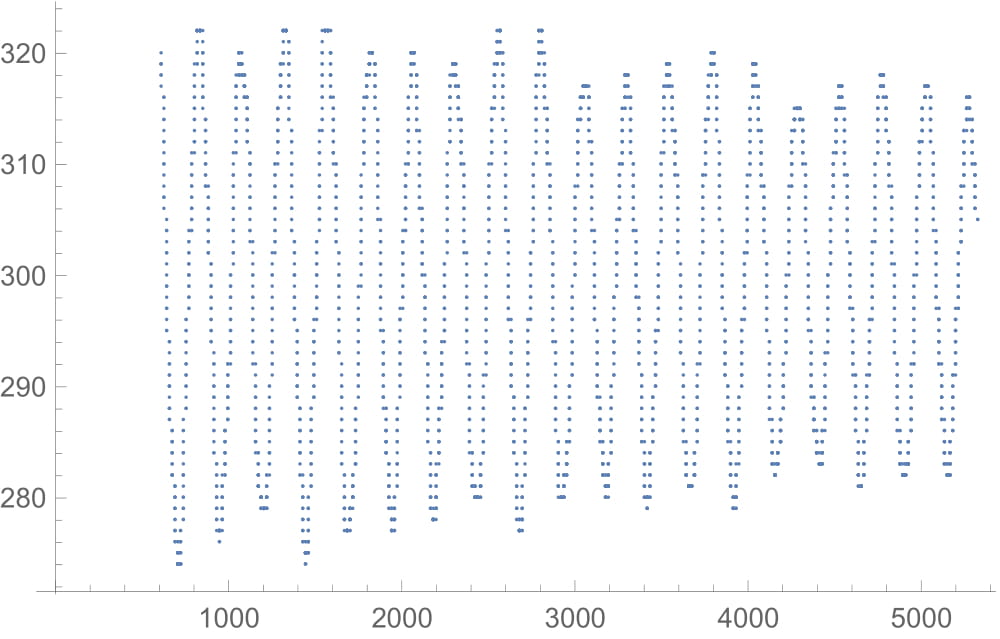
Pri tem nihanju smo uporabili slabo konfiguracijo - spodnje nihalo ima toliko večji koeficient da praktično ne niha samostojno, ampak samo niha v fazi z zgornjim nihalom.
Sicer je graf težko berljiv, ampak porodi dobre rezultate.
Podobno kot pri 2. primeru.
Analizirali smo le grafe z dvema vzmetnima nihaloma, saj je trackerju sledenje gibanj v smeri levo-desno iz nekega razloga predstavljal velik problem. Rezultat analize gibanja takih posnetkov vrne popolnoma nesmiselne grafe, skrajni tracker hitro neha slediti utežem. Prav tako je pri večini primerov, kjer je bilo sklopljeno nihalo iz dveh vzmeti, tracker slabo sledil utežem, tako da smo uporabili 3 najboljše rezultate.
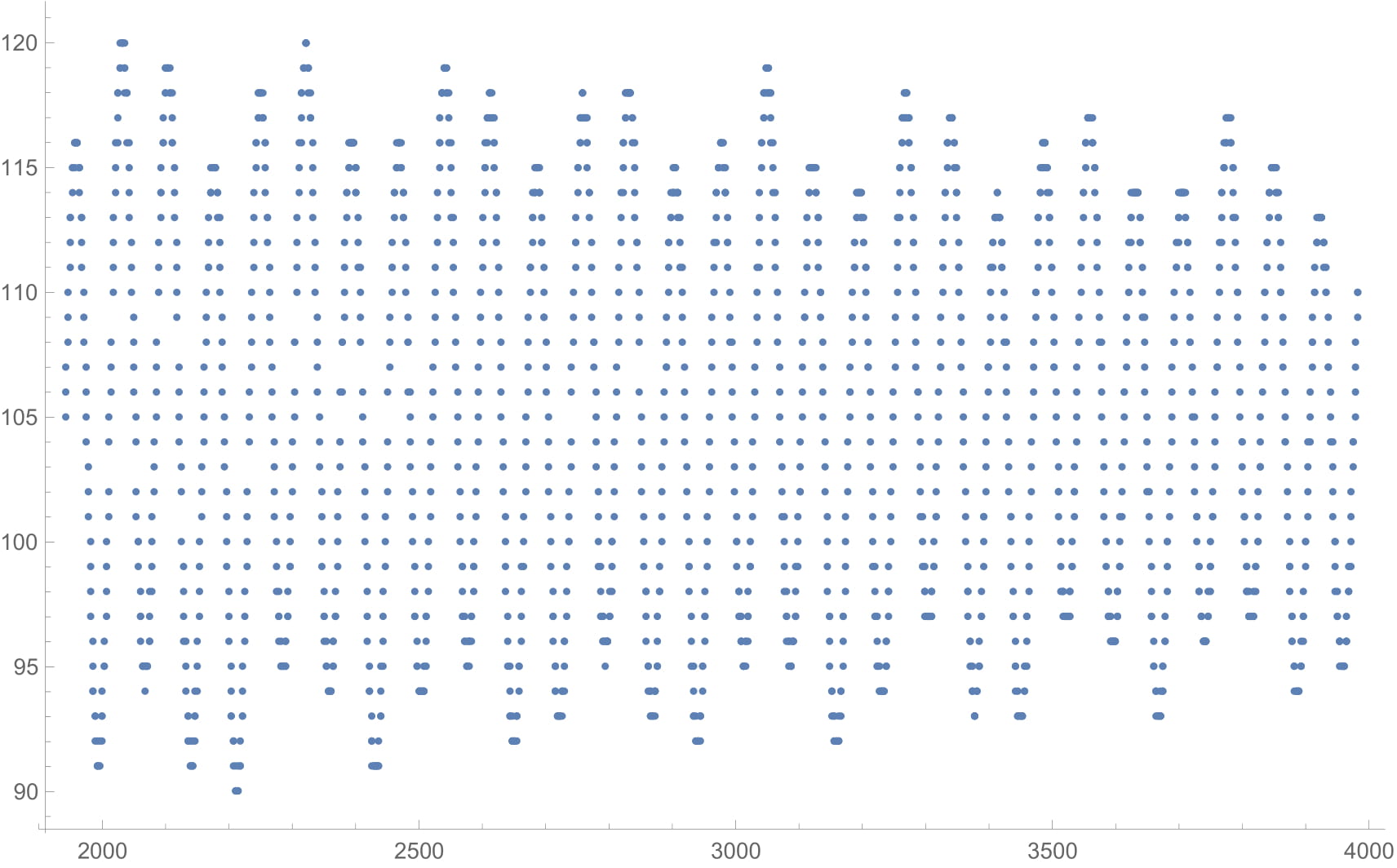
| Primer [/] | Nihajni čas v inercialnem sistemu [ms-2] | Nihajni čas [ms] |
|---|---|---|
| 2515 | 359 \(\pm \) 3,59 | 321,3 \(\pm \) 88 |
| 2502 | 1027 \(\pm \) 10 | 1042 \(\pm \) 288 |
| 2503 | 380 \(\pm \) 3,8 | 321,3 \(\pm \) 88 |
2. Eksperiment
Za določitev vpliva pospeška na nihajni čas smo uporabili meritve nihanj pri različnih pospeških. Pri vsakem nihanju smo iz fittane krivulje dobili nihajni čas.
Lastna nihanja| # | Utež [g] | Nihajni čas [ms] |
|---|---|---|
| 1 | 50 | 962 \(\pm \) 3 |
| 2 | 100 | 933 \(\pm \) 13 |
Graf lastnega nihanja v primeru 1.
Graf lastnega nihanja v primeru 2.
Iz grafov ne razberemo nič novega in zanimivega, bolj jih imamo v mislih za primerjavo z naslednjimi grafi. Nihajni čas nihala je \(t_0 = 956 \pm 5 ms\).
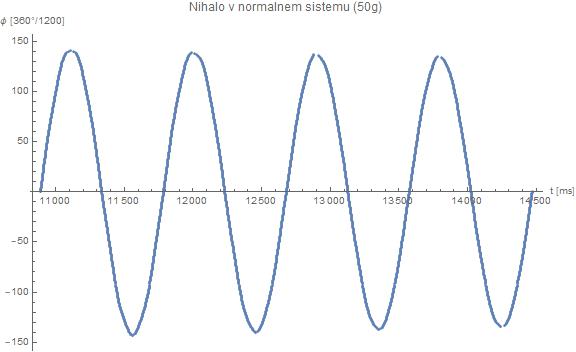
Nihalo s 50g utežjo:
| Primer [/] | Pospešek [ms-2] | Nihajni čas [ms] |
|---|---|---|
| Voz 1 | 0,068 \(\pm \) 0,006 | 893 \(\pm \) 1 |
| Voz 2 | 0,313 \(\pm \) 0,028 | 890,3 \(\pm \) 0,2 |
| Voz 3 | 0,706 \(\pm \) 0,062 | 872 \(\pm \) 11 |
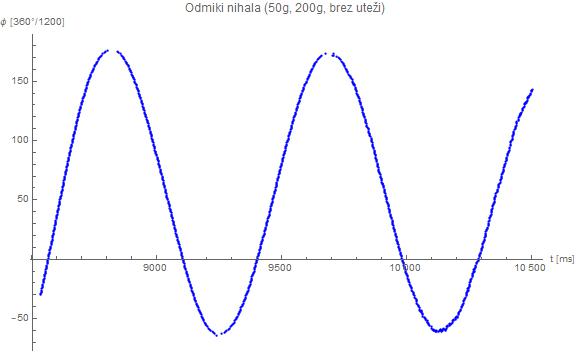
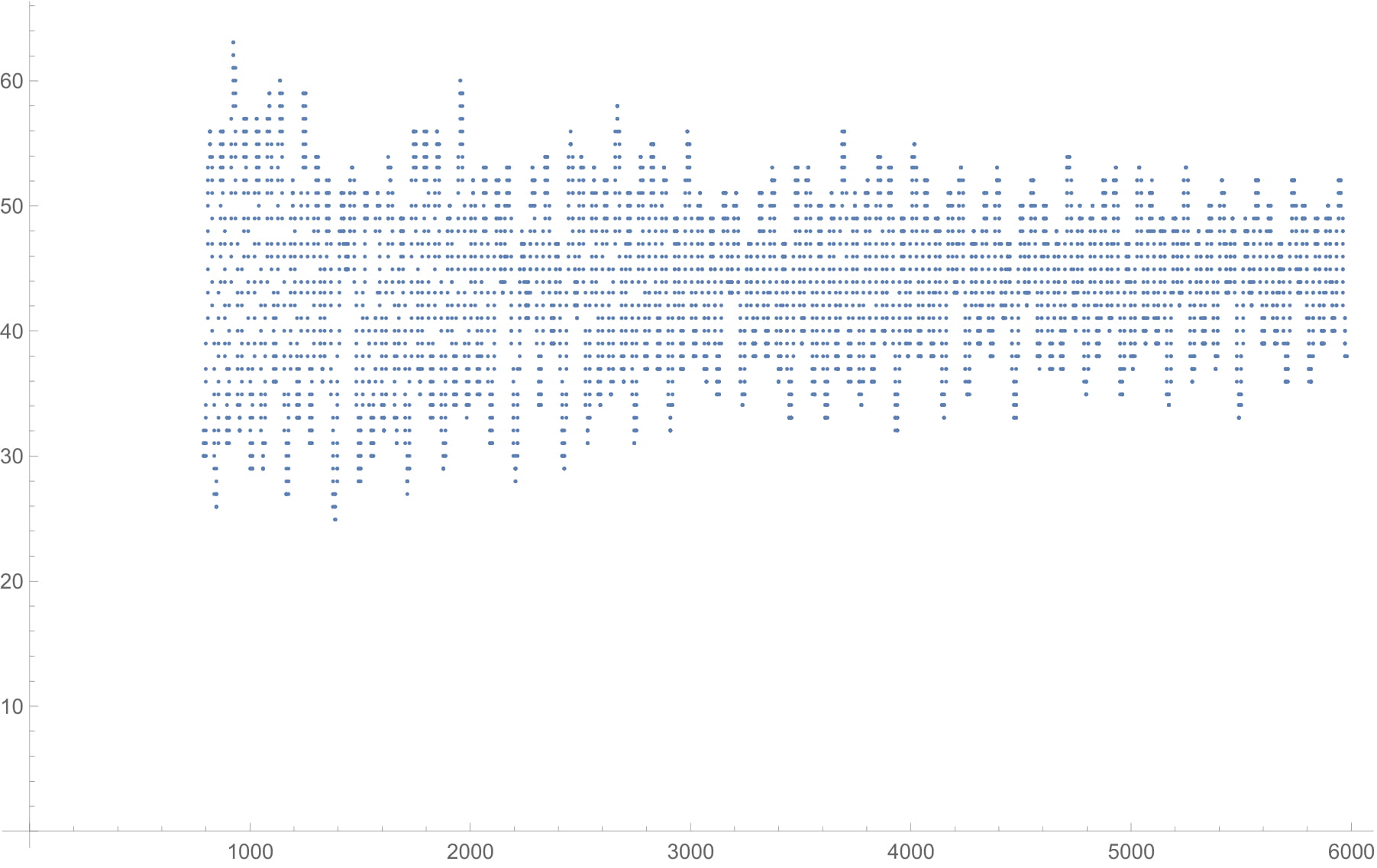
Graf nihanja vozička 3
Vidimo, da se pri uvedbi zunanjega pospeška nihajni čas očitno zmanjša. Poleg tega lahko opazimo, da je graf zamaknjen na y-osi, kar lahko razumemo kot premik mirovne lege.
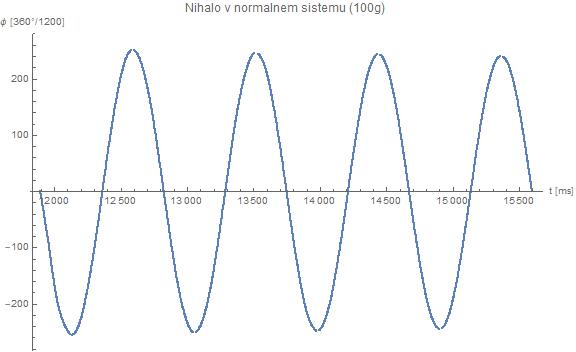
Nihalo s 100g utežjo:| Primer [/] | Pospešek [ms-2] | Nihajni čas [ms] |
|---|---|---|
| Voz 4 | 0,12 \(\pm \) 0,01 | 900 \(\pm \) 5 |
| Voz 5 | 0,396 \(\pm \) 0,035 | 890 \(\pm \) 7 |
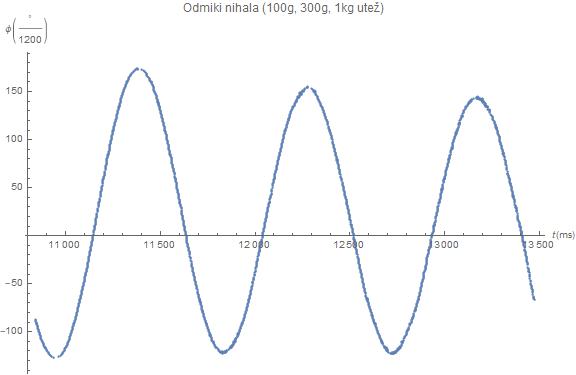
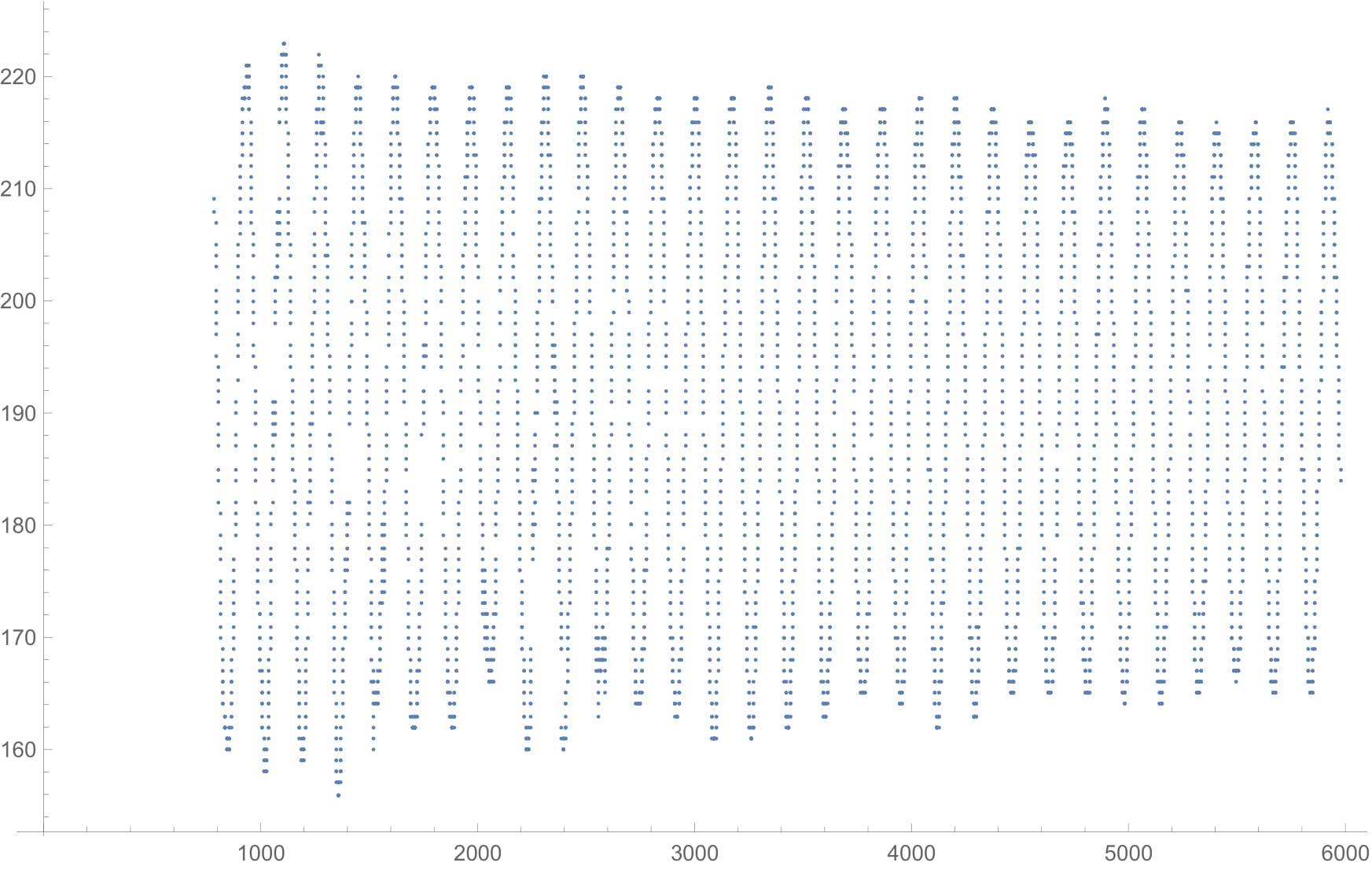
Graf nihanja vozička 5
Tukaj sicer vidimo višje nihajne čase, kot pri prejšnjih primerih, pričakovali pa bi nižje. To je samo zato, ker smo malo razbremenili voziček, tako da je bil malo lažji. Če bi imel isto maso kot pri vozičkih 1-3 bi verjetno dobili nižje pospeške. Vse meritve smo uredili v graf \(t_0(a)\).
Negotovosti
Pri obeh eksperimentih smo prepoznali nekaj eksperimentalnih nedoločnosti.
1. Eksperiment:
Negotovosti so se pri prvem eksperimentu pojavile pri določanju koeficientov vzmeti, teži uporabljenih uteži in natančnosti programa za sledenje na računalniku.
Koeficiente smo določili tako, da smo pri treh obtežitvah vzmetem izmerili raztezek, tako določili 3 koeficiente in jih povprečili.
Pri masi uteži se pojavi napaka, ker vse uteži niso enako težke, to smo ocenili s tehtanjem uteži.
Prav tako dobimo napako zaradi obdelave podatkov - program za sledenje ni vedno točen. Program more nekje najti rob objekta, ki mu sledi - ta ocena ni vedno točna,
zato se zamakne tudi pozicija objekta, ki jo program vrne za obdelavo - napako smo ocenili.
Instrumentalne napake se pojavijo v obliki napake trackerja in mase uteži, koeficient vzmeti pa sta slučajna napaki.
| # | Količina | Ocena napake | Komentar |
|---|---|---|---|
| 1 | Koeficient vzmeti | \( k_1 ±0,41 \frac{N}{m}, k_2 = ±0,064 \frac{N}{m} \) | Iz povprečenja |
| 2 | Masa uteži | m ±3g | |
| 3 | Sledilnik (tracker) | \(\pm \) 10 px | Ocena |
2. Eksperiment:
Kot prvo se pojavi napaka na merilniku kotov - merilnik je razdeljen na 1200 razdelkov, torej bolj natančno od enega razdelka ne moremo meriti.
Poleg tega se pojava napaka v prepotovani razdalji vozička - vpliva na pospeške, ki smo jih določili. Do tega pride, ker voziček ne potuje pravokotno na merilni črti
- je zamaknjen za nekaj stopinj od pravokotnice (npr. do 5 stopinj), zato pa je prepotovana pot tudi malo daljša.
Arduino ima notranjo uro (oscilator) preko katerega meri čas med intervali, kadar dobi informacijo, kje se nahaja nihalo. Oscilator je natančen na nekaj ms.
Napako smo ocenili glede na zamik danih rezultatov, saj se v meritvah časa vidi, kdaj oscilator prehiteva oz. zamuja - tako smo dobili povprečno odstopanje.
Merilnik kotov in oscilator sta instrumentalni napaki, zamik vozička pa slučajna.
| # | Količina | Ocena napake | Komentar |
|---|---|---|---|
| 1 | Merilnik kotov | \( \frac{360^\circ}{1200} = 0,3^\circ \) | |
| 2 | Dolžina poti | 8,8% | \(s = \frac{d}{cos\phi} \) -pravokotni trikotnik |
| 3 | Oscilator | \(\pm \) 3 ms |
Pri prvem eksperimentu bi eksperimentalne nedoločnosti izboljšalli z uporabo natančnejših merilnikov.
Pri vzmetnih nihalih naj bi nihali nihali ravno gor in dol, kar se ne zgodi ker vedno uidejo levo in desno, to bi resili s postavitvijo neke vrste tirnice,
da bi nihali vedno potovali po isti poti.
Pri izračunu koeficientov vzmeti bi lahko izvedli več meritev kot samo tri, to bi nam prineslo bolj natančno vrednost k.
Prav tako nam je dosti problemov delala programska oprema. Velikokrat se je zgodilo, da sledilec ni delal prav in smo mogli večkrat obdelati video, da smo prišli do uporabnih rezultatov.
Pri drugem eksperimentu zagotovo na meritve najbolj vpliva tir poti, saj direktno spremeni nihanje zaradi drugačnega pospeška in povzroči, da izmerimo predolg čas.
Voziček bi lahko montirali na tirnice, da bi vsakič zagotovili enako pot in se tako znebili in različnega pospeška in razlike v poti (času).
Prav tako bi lahko merili čas na več točkah, kar bi nam dalo bolj realistično (in natančno) sliko sile uteži na voziček, torej bi lahko bolj natančno določili pospešek.
Kriva vožnja je vplivala na pospešek vozička in s tem na celotno nihanje.